
Le robot sous-marin autonome qui nettoie les fonds marins de Marseille comme un aspirateur
Un système technologique paneuropéen composé de drones, de capteurs et d'une pince robotisée entre en action pour éliminer le plastique, le verre et autres déchets immergés
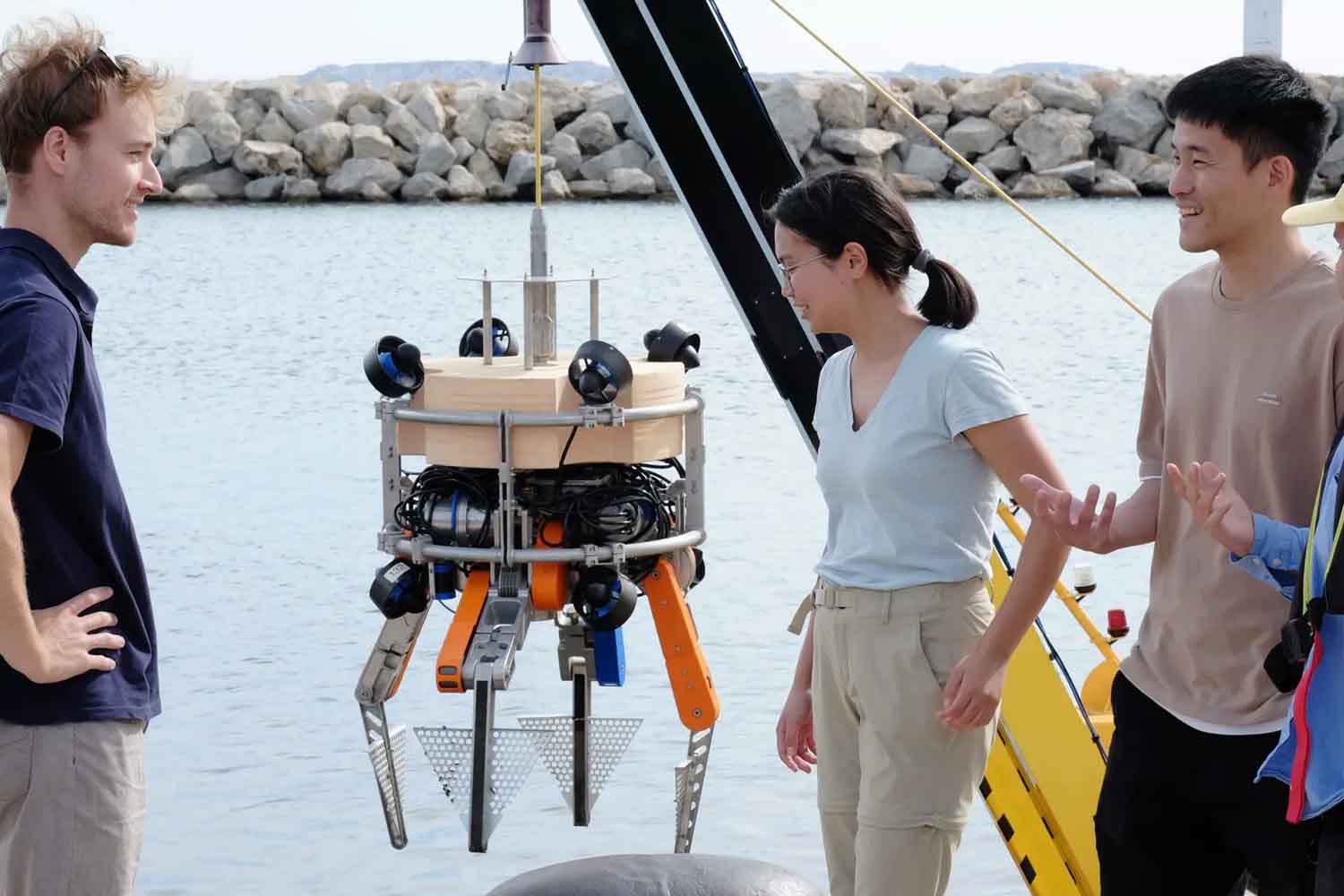
SEACLEAR, un robot sous-marin autonome conçu pour identifier et collecter les déchets marins cachés dans les fonds marins, est entré en action pour la première fois dans le port de Marseille. L'appareil a été conçu par un groupe de chercheurs de l'Université technique de Munich (TUM), dans le cadre d'un projet européen financé par l'Union européenne et développé en collaboration avec plusieurs universités.
L'idée est née d'une urgence concrète : chaque année, selon l'Agence européenne pour l'environnement, environ 626 millions d'objets flottants finissent dans la mer, mais peu de gens parlent des déchets qui coulent et y restent, invisibles mais présents, pendant des années. SEACLEAR a été créé pour lutter contre cette partie cachée de la pollution marine.
Une équipe de robots et de capteurs travaillent ensemble pour collecter les déchets immergés
Le robot SEACLEAR ne fonctionne pas seul. Il fait partie d'un système intégré composé d'un navire de support, d'un drone aérien, d'un robot explorateur sous-marin et enfin d'un robot collecteur équipé d'une pince. Chaque élément a une tâche bien spécifique.
Le navire, par exemple, est chargé de cartographier les fonds marins et de transmettre l'énergie et les données aux robots via un câble. Le drone et le robot explorateur servent plutôt à localiser précisément les déchets, même dans les eaux troubles, grâce à l’utilisation combinée de caméras et de sonar. Une fois identifiées, l'intelligence artificielle entre en jeu, qui transforme les images en modèles 3D pour comprendre où saisir les objets sans les endommager, comme l'explique Stefan Sosnowki, l'un des chercheurs impliqués dans le projet :
Nous avons installé une caméra et un sonar pour orienter le robot même dans des conditions de mauvaise visibilité.
Au cours des phases de test, le système a traité plus de 7 000 images pour affiner la reconnaissance et la saisie des objets.
Une pince de 4 000 Newtons ramasse des objets pesant jusqu'à 250 kg sans les casser
Le cœur opérationnel du système SEACLEAR est le robot de récolte, équipé d'une pince mécanique à quatre doigts capable d'exercer une force de 4 000 newtons. Il peut ramasser des objets pesant jusqu'à 250 kilogrammes sans les casser, même lorsqu'il s'agit de matériaux fragiles comme le verre. C'est grâce à une série de capteurs de force qui modulent l'adhérence pour éviter la casse.
Le robot se déplace sous l'eau grâce à huit turbines et est connecté au navire via un câble multifonction, qui assure l'électricité et la connexion des données. Cela permet d'éviter les limites d'autonomie qui, selon l'équipe, n'auraient pas dépassé deux heures.
Pour se stabiliser dans l'eau, le robot est entouré de 120 kg de matériel flottant, une solution simple mais efficace pour maintenir sa position lorsque les turbines ne fonctionnent pas. Cela l’aide à fonctionner avec précision, même dans des conditions loin d’être idéales.
Le test réalisé dans le port de Marseille a donné de bons résultats, ouvrant la voie à la création d'une véritable flotte de robots sous-marins capables d'opérer de manière autonome dans plusieurs mers européennes.
Le projet SEACLEAR 2.0 implique, outre la TUM, également le Fraunhofer CML, la TU Delft (Pays-Bas), l'Université de Dubrovnik (Croatie) et l'Université technique de Cluj-Napoca (Roumanie). L’objectif est clair : développer des systèmes automatiques capables de collecter systématiquement les déchets immergés, avec un impact environnemental minimal.
Une avancée importante pour la protection des écosystèmes marins, souvent compromis par des déchets invisibles à l’œil nu mais mortels pour la faune et la flore sous-marine.
Source : tum.de





